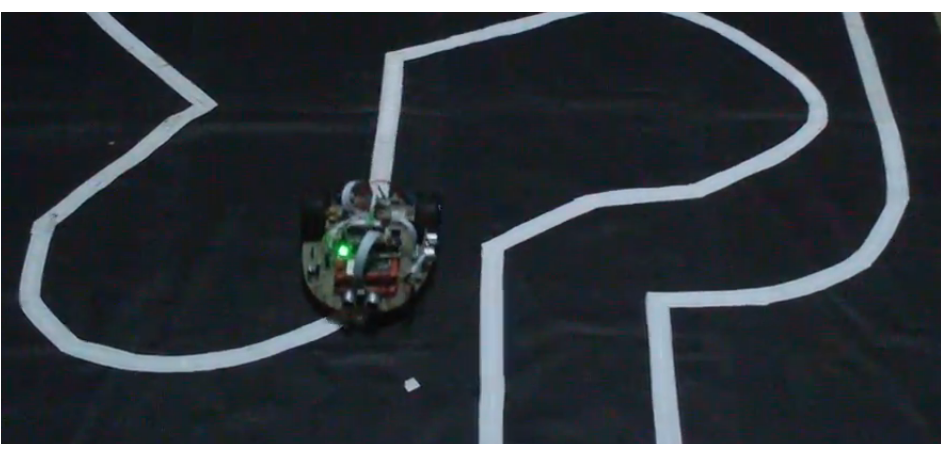
This line follower can successfully negotiate lines having acute angle, obtuse angle and various curvature. It can also avoid any obstacle in front of it and continue to follow the line again.
Total seven IR sensors were used to detect line and two sonar sensors were used to detect obstacles.We used Arduino mega to control the robot.
Here is the Circuit that we designed in Proteus. We used the two layer PCB as the chassis of the robot as well.
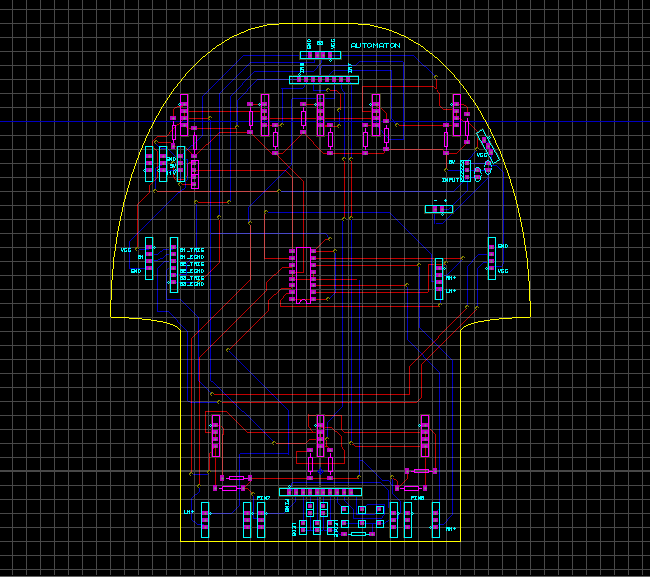
Designed circuit in PROTEUS
Project completion date: September, 2014
Team members: Ezazul Haque Sabuz, Md. Shariful Islam, Shahriar Chowdhury, Rajkumar Dhar

Leave a comment